В данном примере нужно определить реактивную мощность, которую генерирует синхронный двигатель серии СТМ-800-2 на напряжение 6 кВ мощностью 800 кВт.
Исходные данные
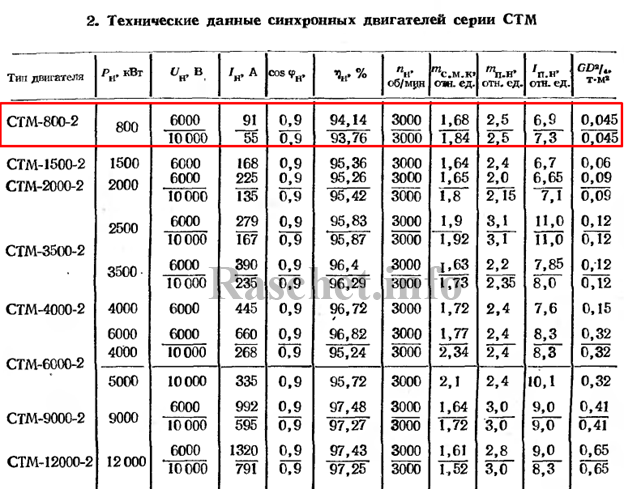
Технические характеристики на двигатель принимаются согласно [Л1, с.204] либо по каталогу завода-изготовителя:
- Номинальная активная мощность на валу двигателя – Рн = 800 кВт;
- Коэффициент полезного действия (КПД) – ηн = 0,941;
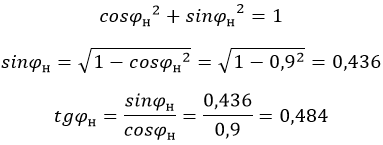
- Коэффициент мощности – cosφн=0,9;
Решение
1. Определяем коэффициент реактивной мощности синхронного двигателя, зная значение cosϕн=0,9:
2. Определяем реактивную мощность синхронного двигателя по выражению 35 [Л2, с.55]:

3. Для прикидочных расчетов номинальную реактивную мощность синхронного двигателя можно, определить по выражению 36 [Л2, с.55]:
Qн = 0,5*Рн = 0,5*800 = 400 квар
Как видно из результатов расчета, значения не сильно отличаются.
Также хотел бы добавить, что при генерации реактивной мощности синхронными двигателями возникают активные потери.
4. Для прикидочных расчетов потери активной мощности при генерации реактивной мощности можно приближенно подсчитать, исходя из к.п.д. двигателя по выражению 39 [Л2, с.56]:

Литература:
- Режимы работы, релейная защита и автоматика синхронных электродвигателей. М.И.Слодарж, 1977 г.
- Реактивная мощность (2-е издание) Минин Г.П. 1978 г.





Таким методом расчёта стоит пользоваться с оглядкой. Есть нюансы применительно к статическим и бесщёточным системам возбуждения.
Генерация реактивной мощности обуславливается работой системы возбуждения на генераторе или на синхронном двигателе, а конкретно применяемым шкафом управления возбуждения, его алгоритмами управления, наличием цифровой системы автоматического регулирования ( в терминологии генераторов — быстродействующего автоматического регулятора возбуждения, АРВ).
Как правило, производители СД не производят собственные шкафы управления возбуждения, производством которых занимаются другие наукоёмкие производства. Потому на шильде двигателя указывается cosφ=0,9. И возможность его улучшить существует!
При наличии современного цифрового регулятора возбуждения, с современными алгоритмами, можно задать уставки для работы с требуемым cosφ или фиксированными значениями реактивного тока. В зависимости от нагрузки на машину, технологического режима установки, можно выставить перевозбуждение для компенсации реактивной мощности других потребителей реактивной мощности на объекте, или поддерживать автоматически cosφ=1 (реактивный ток будет равен 0), при этом двигатель не будет вылетать из синхронизма.
Но такие плюшки возможны только при наличии для цифровых регуляторов.