В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт |
|
U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; |
| Потребляемая реактивная мощность, квар |
|
|
| Полезная мощность на валу, кВт |
|
Ƞ — КПД двигателя; |
| Потребляемый двигателем ток, А |
|
|
| Вращающий момент двигателя, кГм |
|
nном. – номинальная скорость вращения ротора, об/мин; |
| Синхронная скорость вращения магнитного поля, об/мин |
|
f1 – частота питающего тока, Гц; р – число пар полюсов машины; |
| Скольжение двигателя |
|
|
| Скорость вращения ротора при нагрузке, об/мин |
|
|
| ЭДС обмоток статора и ротора, В |
|
kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; |
| Коэффициенты трансформации по напряжению и по току |
|
w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора. У двигателей с фазным ротором. m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. |
| Параметры схемы замещения |
|
zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; Iп – пусковой ток двигателя, А; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; r2’, x2’ – активные и индуктивные сопротивления ротора, приведенные к обмотке статора, Ом; |
| Ток холостого хода, А |
|
Iном. – номинальный ток двигателя, А |
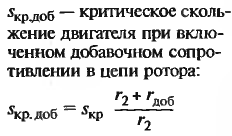
| Критическое скольжение |
|
sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; |
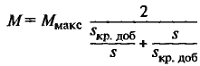
| Уравнение вращающего момента |
|
Sном. – скольжение при номинальной нагрузке |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор |
|
|
| КПД двигателя при введении добавочного сопротивления в ротор |
|
|
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм |
|
U1ф – фазное напряжение, В |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
|
|





Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.




Отправляя сообщение, Вы разрешаете сбор и обработку персональных данных.
Политика конфиденциальности.